Различают детерминированные и недетерминированные конечные автоматы. КА называется недетерминированным (НДКА), если в диаграмме его состояний из одной вершины исходит несколько дуг с одинаковыми пометками. Например, КА из примера 2.2.2 является НДКА. Хотя НДКА располагает, на первый взгляд, большими возможностями, чем детерминированный КА, классы языков, которые они допускают, в действительности совпадают.
По описанию НДКА всегда можно построить описание детерминированного КА (ДКА). При этом НДКА А
1) с входным алфавитом V,
2) множеством состояний Q = {q0,q,, …,qn.,}
3) и функцией переходов ![]()
преобразуется в ДКА А’, у которого:
1) V’ = V;
2) q0‘ = {q0};
3) Q’ = {![]() , {q0}, {q1}, …, {q0,…, qn-1}};
, {q0}, {q1}, …, {q0,…, qn-1}};
1) ![]() ‘(q’, a) =
‘(q’, a) = ![]()
1) Заключительные состояния F’ — все подмножества Q, содержащие хотя бы одно заключительное состояние автомата А.
Пример 2.2.3. Пусть регулярный язык порождается грамматикой G = <N, Т, Р, S>, у которой N = {S, R}, Т = {a, b}, S = {S},
P = {S ![]() aS | aR
aS | aR
R ![]() bR | a}
bR | a}
Построим НДКА А = <V, Q, ![]() , qQ, F>. Имеем
, qQ, F>. Имеем
1) V = Т = {a, b};
2) Q = {S, R, Z};
3) F = {Z}, отображение представлено на рис.2.3 в виде диаграммы состояний.
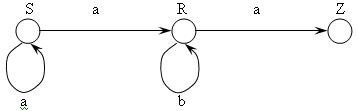
Рис 2.3. Диаграмма состояний НДКА из примера 2.2.3
Построим эквивалентный ему ДКА А’ = <V, Q’, ![]() ‘, q0‘, F’>.
‘, q0‘, F’>.
Возможно создание нескольких вариантов ДКА, распознающих язык L'(G’).
В первом случае компонентами ДКА будут:
V’ = V={a,b};
Q’ = {{S}, {R}, {S, R, Z}}; остальные 4 состояния можно отбросить, так как ни в одно из них автомат попасть не может;
q0‘={S};
F’={{S,R,Z}};
функцию переходов ![]() ‘ можно задать с помощью следующих команд:
‘ можно задать с помощью следующих команд:
({S}, a) ![]() {S, R, Z};
{S, R, Z};
({S, R, Z}, a) ![]() {S, R, Z};
{S, R, Z};
({S, R, Z}, b) ![]() {R};
{R};
({R}, b) ![]() {R};
{R};
({R}, a) ![]() {S, R, Z}.
{S, R, Z}.
Представление ![]() ‘ показано как в виде диаграммы состояний (рис 2.4), так и в виде матрицы переходов:
‘ показано как в виде диаграммы состояний (рис 2.4), так и в виде матрицы переходов:
|
a |
b |
|
|
S |
S,R,Z |
|
|
R |
S,R,Z |
R |
|
S,R,Z |
S,R,Z |
R |
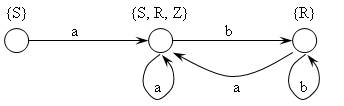
Рис 2.4. Диаграмма состояний ДКА
Построим по описанию ДКА А’ регулярную грамматику G’ = <N’ , Т’ , Р’, S’>. Для этого дадим новые обозначения элементам множества Q’ :
{S} — S’, {R} — R’, {S, R, Z} — К’.
Имеем N’ = {S’, R’, К’ }, T = {a, b}, S’ = {S’},
Р’ = {S’ ![]() аК’
аК’
K’ ![]() aK’ | bR’ | a
aK’ | bR’ | a
R’ ![]() bR’ | aK’ | a}.
bR’ | aK’ | a}.
Во втором случае компонентами ДКА будут:
V’ = V={a,b};
Q’ = {{S}, {R}, {S, R}, {Z}};
q0‘ = {S};
F’ = {{S, R}, {Z}};
функцию переходов ![]() ‘ можно задать с помощью следующих команд:
‘ можно задать с помощью следующих команд:
({S}, a) ![]() {S, R};
{S, R};
({S, R}, a) ![]() {S, R};
{S, R};
({S, R}, b) ![]() {R};
{R};
({R}, b) ![]() {R};
{R};
({R}, a) ![]() {Z}.
{Z}.
диаграмма состояний для этого варианта приведена на рис. 2.5.
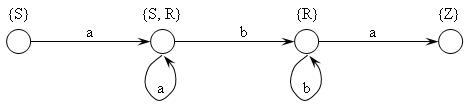
Рис 2.5. Диаграмма состояний ДКА
Для практических целей необходимо, чтобы конечный распознаватель играл более активную роль и сам определял момент окончания входной последовательности символов с выдачей сообщения о правильности или ошибочности входной цепочки. Для этих целей входная цепочка считается ограниченной справа концевым маркером ├. Тогда для конечного автомата из примера 2.2.2 получаем:
V’=V U {├}.
А в диаграмму состояний КА вводятся интерпретированные состояния, будем обозначать эти состояния соответственно:
Z — «допустить входную цепочку»,
О — «запомнена ошибка во входной цепочке»,
Е — «отвергнуть входную цепочку».
Состояния Z и Е являются заключительными, и в них КА переходит при прочтении концевого маркера соответственно после обработки правильной или ошибочной входной цепочки. Состояние О является промежуточным, в него КА переходит из любого допустимого состояния КА при обнаружении ошибки во входной цепочке и остается в нем до поступления концевого маркера ├, после чего осуществляется переход в состояние Е — «отвергнуть входную цепочку».
Ниже приведена модифицированная диаграмма состояний конечного распознавателя из примера 2.2.2 (рис. 2.6)
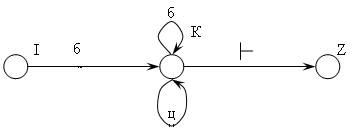
Рис. 2.6. Модифицированная диаграмма состояний КА для распознавания идентификаторов (![]() — не буква)
— не буква)
|
Этой диаграмме состояний соответствует матрица переходов:
|
0 |
1 |
2 |
||
|
б |
ц |
- |
||
|
0 |
I |
K=1 |
E=3 |
E=3 |
|
1 |
K |
K=1 |
K=1 |
Z=2 |
2-успех; 3-ошибка
Для данной матрицы переходов предполагается, что множества ц и ![]() не пересекаются.
не пересекаются.