Наиболее известным общим подходом к формальному описанию процессов функционирования систем является подход, предложенный Я.Я. Бусленко. Этот подход позволяет описывать поведение непрерывных и дискретных, детерминированных и стохастических систем, т. е. по сравнению с рассмотренными является обобщенным (универсальным) и базируется на понятии агрегативной системы (от англ. aggregate system), представляющей собой формальную схему общего вида, которую будем называть А-схемой.
Основные соотношения. Анализ существующих средств моделирования систем и задач, решаемых с помощью метода моделирования на ЭВМ, неизбежно приводит к выводу, что комплексное решение проблем, возникающих в процессе создания и машинной реализации модели, возможно лишь в случае, если моделирующие системы имеют в своей основе единую формальную математическую схему , т.е. А-схему. Такая схема должна одновременно выполнять несколько функций: являться адекватным математическим описанием объекта моделирования, т.е. системы S, служить основой для построения алгоритмов и программ при машинной реализации модели М, позволять в упрощенном варианте (для частных случаев) проводить аналитические исследования.
Приведенные требования в определенной степени противоречивы. Тем не менее в рамках обобщенного подхода на основе А-схем удается найти между ними некоторый компромисс.
По традиции, установившейся в математике вообще и в прикладной математике в частности, при агрегативном подходе сначала дается формальное определение объекта моделирования – агрегативной системы, которая является математической схемой, отображающей системный характер изучаемых объектов. При агрегативном описании сложный объект (система) разбивается на конечное число частей (подсистем), сохраняя при этом связи, обеспечивающие их взаимодействие. Если некоторые из полученных подсистем оказываются в свою очередь еще достаточно сложными, то процесс их разбиения продолжается до тех пор, пока не образуются подсистемы, которые в условиях рассматриваемой задачи моделирования могут считаться удобными для математического описания. В результате такой декомпозиции сложная система представляется в
виде многоуровневой конструкции из взаимосвязанных элементов, объединенных в подсистемы различных уровней.
В качестве элемента А-схемы выступает агрегат, а связь между агрегатами (внутри системы S и с внешней средой Е) осуществляется с помощью оператора сопряжения R. Очевидно, что агрегат сам может рассматриваться как А-схема, т.е. может разбиваться на элементы (агрегаты) следующего уровня.
Любой агрегат характеризуется следующими множествами: моментов времени Т, входных Х и выходных Y сигналов, состояний Z в каждый момент времени t. Состояние агрегата в момент времени ![]() обозначается как
обозначается как ![]() а входные и выходные сигналы – как
а входные и выходные сигналы – как ![]() и
и ![]() соответственно.
соответственно.
Будем полагать, что переход агрегата из состояния z(t1) в состояние z(t2)≠ z(t1) происходит за малый интервал времени, т.е. имеет место скачок δz. Переходы агрегата из состояния z(t1) в z(t2) определяются собственными (внутренними) параметрами самого агрегата ![]() и входными сигналами
и входными сигналами ![]()
В начальный момент времени t0 состояния z имеют значения, равные z0, т.е. z0 = z(t0), задаваемые законом распределения процесса z(t) в момент времени t0, а именно L[z(t0)]. Предположим, что процесс функционирования агрегата в случае воздействия входного сигнала хn описывается случайным оператором V. Тогда в момент поступления в агрегат ![]() входного сигнала хn можно определить состояние
входного сигнала хn можно определить состояние
![]()
Обозначим полуинтервал времени ![]() как (t1, t2], а полуинтервал
как (t1, t2], а полуинтервал ![]() — как [t1, t2). Если интервал времени (tn, tn+1) не содержит ни одного момента поступления сигналов, то для
— как [t1, t2). Если интервал времени (tn, tn+1) не содержит ни одного момента поступления сигналов, то для ![]() состояние агрегата определяется случайным оператором U в соответствии с соотношением
состояние агрегата определяется случайным оператором U в соответствии с соотношением
![]()
Совокупность случайных операторов V и U рассматривается как оператор перехода агрегата в новые состояния. При этом процесс функционирования агрегата состоит из скачков состояний δz в моменты поступления входных сигналов х (оператор V) и изменений состояний между этими моментами tn и tn+1 (оператор U). На оператор U не накладывается никаких ограничений, поэтому допустимы скачки состояний δz в моменты времени, не являющиеся моментами поступления входных сигналов х. В дальнейшем моменты скачков δz будем называть особыми моментами времени tδ, а состояния z(tδ) – особыми состояниями А-схемы. Для описания скачков состояний δz в особые моменты времени tδ будем использовать случайный оператор W, представляющий собой частный случай оператора U, т.е.
z(tδ + 0) = W[tδ,, z(tδ)].
В множестве состояний Z выделяется такое подмножество Z(Y), что если z(tδ) достигает Z(Y), то это состояние является моментом выдачи выходного сигнала, определяемого оператором выходов
Y = G[tδ,, z(tδ)].
Таким образом, под агрегатом будем понимать любой объект, определяемый упорядоченной совокупностью рассмотренных множеств Т, X, Y, Z, Z(Y), H и случайных операторов V, U, W, G.
Последовательность входных сигналов, расположенных в порядке их поступления в А-схему, будем называть входным сообщением или х-сообщением. Последовательность выходных сигналов, упорядоченную относительно времени выдачи, назовем выходным сообщением или у-сообщением.
Возможные приложения. Существует класс больших систем, которые ввиду их сложности не могут быть формализованы в виде математических схем одиночных агрегатов, поэтому их формализуют некоторой конструкцией из отдельных агрегатов Аn, ![]() которую назовем агрегативной системой или А-схемой. Для описания некоторой реальной системы S в виде А-схемы необходимо иметь описание как отдельных агрегатов Аn, так и связей между ними.
которую назовем агрегативной системой или А-схемой. Для описания некоторой реальной системы S в виде А-схемы необходимо иметь описание как отдельных агрегатов Аn, так и связей между ними.
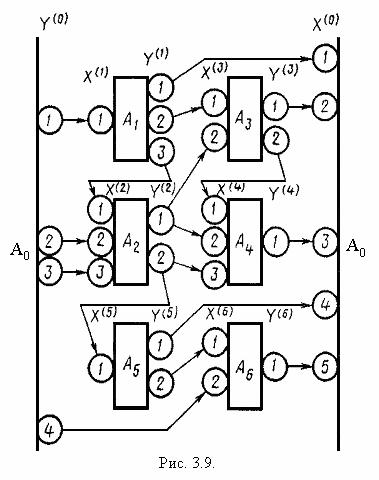
Пример 3.9. Рассмотрим А-схему, структура которой приведена на рис. 3.9. Функционирование А-схемы связано с переработкой информации, передача последней на схеме показана стрелками. Вся информация, циркулирующая в А-схеме, делится на внешнюю и внутреннюю. Внешняя информация поступает от внешних объектов, не являющихся элементами рассматриваемой схемы, а внутренняя информация вырабатывается агрегатами самой А-схемы. Обмен информацией между А-схемой и внешней средой Е происходит через агрегаты, которые называются полюсами А-схемы. При этом различают входные полюсы А-схемы, представляющие собой агрегаты, на которые поступают х-сообщения (агрегаты А1, А2, А6), и выходные полюсы А-схемы, выходная информация которых является ![]() -сообщениями (агрегаты A1, А3, А4, А5, А6). Агрегаты, не являющиеся полюсами, называются внутренними.
-сообщениями (агрегаты A1, А3, А4, А5, А6). Агрегаты, не являющиеся полюсами, называются внутренними.
Каждый n-й агрегат А-схемы Аn имеет входные контакты, на которые поступает совокупность элементарных сигналов xi(t), ![]() одновременно возникающих на входе элемента, и выходные контакты, с которых снимается совокупность элементарных сигналов yj(t),
одновременно возникающих на входе элемента, и выходные контакты, с которых снимается совокупность элементарных сигналов yj(t), ![]() Таким образом, каждый агрегат А-схемы Ап имеет In входных и Jn выходных контактов.
Таким образом, каждый агрегат А-схемы Ап имеет In входных и Jn выходных контактов.
Описание отдельного агрегата уже рассмотрено, поэтому для построения формального понятия А-схемы остается выбрать достаточно удобные способы математического описания взаимодействия между агрегатами. Для этого введем ряд предположений о закономерностях функционирования А-схем, хорошо согласующихся с опытом исследования реальных сложных систем:
ü взаимодействие между А-схемой и внешней средой Е, а также между отдельными агрегатами внутри системы S осуществляется при передаче сигналов, причем взаимные влияния, имеющие место вне механизма обмена сигналами, не учитываются;
ü для описания сигнала достаточно некоторого конечного набора характеристик;
ü элементарные сигналы мгновенно передаются в А-схеме независимо друг от друга по элементарным каналам;
ü к входному контакту любого элемента А-схемы подключается не более чем один элементарный канал, к выходному контакту — любое конечное число элементарных каналов при условии, что ко входу одного и того же элемента А-схемы направляется не более чем один из упомянутых элементарных каналов.
Взаимодействие А-схемы с внешней средой Е рассматривается как обмен сигналами между внешней средой Е и элементами А-схемы. В соответствии с этим внешнюю среду Е можно представить в виде фиктивного элемента системы А0, вход которого содержит I0 входных контактов![]() а выход — J0 выходных контактов
а выход — J0 выходных контактов ![]() Сигнал, выдаваемый А-схемой во внешнюю среду Е, принимается элементом А0 как входной сигнал, состоящий из элементарных сигналов
Сигнал, выдаваемый А-схемой во внешнюю среду Е, принимается элементом А0 как входной сигнал, состоящий из элементарных сигналов ![]() Сигнал, поступающий в А-схему из внешней среды Е, является выходным сигналом элемента А0 и состоит из элементарных сигналов
Сигнал, поступающий в А-схему из внешней среды Е, является выходным сигналом элемента А0 и состоит из элементарных сигналов ![]()
Таким образом, каждый Аn (в том числе и А0) как элемент А-схемы в рамках принятых предположений о механизме обмена сигналами достаточно охарактеризовать множеством входных контактов ![]() которое обозначим
которое обозначим ![]() и множеством выходных контактов
и множеством выходных контактов ![]() которое обозначим
которое обозначим ![]() где
где ![]() Полученная пара множеств
Полученная пара множеств ![]()
![]() является математической моделью элемента Аn, используемого для формального описания сопряжения его с прочими элементами А-схемы и внешней средой Е.
является математической моделью элемента Аn, используемого для формального описания сопряжения его с прочими элементами А-схемы и внешней средой Е.
В силу предположения о независимости передачи сигналов каждому входному контакту
![]()
соответствует не более чем один выходной контакт
![]()
где ![]() — множество входных контактов всех элементов А-схемы и внешней среды Е;
— множество входных контактов всех элементов А-схемы и внешней среды Е;
![]() - множество выходных контактов всех элементов А-схемы и внешней среды Е, с которыми она связана элементарным каналом;
- множество выходных контактов всех элементов А-схемы и внешней среды Е, с которыми она связана элементарным каналом;
k, ![]()
Поэтому можно ввести однозначный оператор ![]() с областью определения в множестве
с областью определения в множестве ![]() и областью значений в множестве
и областью значений в множестве ![]() , сопоставляющий входному контакту
, сопоставляющий входному контакту ![]() выходной контакт
выходной контакт ![]() связанный с ним элементарным каналом. Если в А-схеме к контакту
связанный с ним элементарным каналом. Если в А-схеме к контакту ![]() не подключен никакой элементарный канал,
не подключен никакой элементарный канал,
то оператор R не определен на этом контакте ![]() . Оператор R называется оператором сопряжения элементов (агрегатов) в А-схему. Совокупность множеств
. Оператор R называется оператором сопряжения элементов (агрегатов) в А-схему. Совокупность множеств ![]() ,
, ![]() и оператор R образуют схему сопряжения элементов в систему S.
и оператор R образуют схему сопряжения элементов в систему S.
Рассмотрим оператор сопряжения для А-схемы, структура которой показана на рис. 3.9. Оператор сопряжения R можно задать в виде таблицы, в которой на пересечении строк с номерами элементов (агрегатов) n и столбцов с номерами контактов i располагаются пары чисел k, l, указывающие номер элемента k и номер контакта l, с которым соединен контакт ![]() (табл. 3.7).
(табл. 3.7).
 Если столбцы и строки такой таблицы пронумеровать двойными индексами n, i и k, l соответственно и на пересечении помещать 1 для контактов n, i и k, l соединенных элементарным каналом и 0 в противном случае, то получим матрицу смежности ориентированного графа, вершинами которого являются контакты агрегатов, а дугами — элементарные каналы А-схемы.
Если столбцы и строки такой таблицы пронумеровать двойными индексами n, i и k, l соответственно и на пересечении помещать 1 для контактов n, i и k, l соединенных элементарным каналом и 0 в противном случае, то получим матрицу смежности ориентированного графа, вершинами которого являются контакты агрегатов, а дугами — элементарные каналы А-схемы.
Рассмотренная схема сопряжения агрегатов в А-схему, заданная совокупностью множеств ![]() ,
, ![]() и оператором R, является одноуровневой схемой сопряжения. В более сложных случаях могут быть использованы многоуровневые иерархические схемы сопряжения. Схема сопряжения агрегата, определяемая оператором R, может быть использована для описания весьма широкого класса объектов. Однако взаимодействие элементов реальных систем даже в рамках механизма обмена сигналами не сводится к одному лишь сопряжению. Помимо сопряжения контактов серьезную роль играют также согласование совокупности элементарных сигналов, поступающих в элементарный канал от выходных контактов и воспринимаемых входными, а также влияние реальных средств передачи сигналов на их содержание. Кроме того, оказываются полезными некоторые дополнительные ограничения на структуру сопряжения агрегатов системы S с внешней средой Е. Поэтому с практической точки зрения представляет интерес понятие А-схемы как типовой математической, отражающей наши представления о взаимодействии реальных объектов в рамках механизмов обмена сигналами.
и оператором R, является одноуровневой схемой сопряжения. В более сложных случаях могут быть использованы многоуровневые иерархические схемы сопряжения. Схема сопряжения агрегата, определяемая оператором R, может быть использована для описания весьма широкого класса объектов. Однако взаимодействие элементов реальных систем даже в рамках механизма обмена сигналами не сводится к одному лишь сопряжению. Помимо сопряжения контактов серьезную роль играют также согласование совокупности элементарных сигналов, поступающих в элементарный канал от выходных контактов и воспринимаемых входными, а также влияние реальных средств передачи сигналов на их содержание. Кроме того, оказываются полезными некоторые дополнительные ограничения на структуру сопряжения агрегатов системы S с внешней средой Е. Поэтому с практической точки зрения представляет интерес понятие А-схемы как типовой математической, отражающей наши представления о взаимодействии реальных объектов в рамках механизмов обмена сигналами.
Упорядоченную совокупность конечного числа агрегатов Аn, ![]() системы S, агрегата А0, характеризующего внешнюю среду Е, и оператора R, реализующего отображение
системы S, агрегата А0, характеризующего внешнюю среду Е, и оператора R, реализующего отображение ![]() будем называть А-схемой при следующих условиях:
будем называть А-схемой при следующих условиях:
1) для любых ![]() и
и ![]() в данной А-схеме
в данной А-схеме ![]()
2) если ![]() то
то
![]() (3.17)
(3.17)
где ![]() - соответствующие множества элементарных сигналов;
- соответствующие множества элементарных сигналов;
3) для любого момента t’ выдачи непустого элементарного сигнала
![]() (3.18)
(3.18)
имеет место ![]() (3.19)
(3.19)
![]() (3.20)
(3.20)
где ![]()
Ограничение (3.17) относится к структуре сопряжения агрегатов А-схемы системы S с внешней средой Е и требует, чтобы каждый элементарный канал, передающий сигналы во внешнюю среду, начинался в одном из выходных контактов одного из агрегатов системы, каждый элементарный канал, передающий сигналы из внешней среды, заканчивался на одном из входных контактов А-схемы. Ограничение (3.18) предусматривает, что сигналы в А-схеме передаются непосредственно от одного агрегата к другому без устройств, способных отсеивать сигналы по каким-либо признакам. Ограничение (3.19) относится к согласованию функционирования агрегатов А-схемы во времени. Ограничение (3.20) предусматривает, что сигналы между агрегатами А-схемы передаются мгновенно, без искажений и перекодирования, изменяющего структуру сигнала. Для многих реальных систем ограничения (3.18) и (3.20) оказываются несправедливыми. Для того чтобы А-схема была адекватной моделью реального объекта, достаточно описать селектирующие устройства, реальные средства передачи сигналов и всевозможные вспомогательные устройства как самостоятельные агрегаты, связи между которыми удовлетворяют перечисленным ограничениям.
Пример 3.10. Рассмотрим представление некоторой системы в виде отдельного агрегата. Для того чтобы упростить описание объекта моделирования и проследить связи с уже рассмотренными схемами, воспользуемся в качестве объекта такого моделирования схемой массового обслуживания (Q-схемой) и представим ее в виде агрегата (A-схемы). Для определенности полагаем, что имеется однофазная одноканальная система SQ, показанная на рис. 3.5. В моменты времени tj, образующие однородный поток случайных событий, в прибор (П) поступают заявки, каждая из которых характеризуется случайным параметром ej. Если обслуживающий канал (К) занят, то заявка поступает в накопитель (Н) и может ждать там не более чем γj = φ(ej, h), где h — параметр, характеризующий производительность системы обслуживания. Если к моменту (tj+γj) заявка не будет принята к обслуживанию, то она теряется. Время обслуживания заявки τj = ψ(ej, h).
При представлении этой Q-схемы в виде А-схемы опишем ее состояния вектором ![]() со следующими компонентами: z1(t) — время, оставшееся до окончания обслуживания заявки, которая находится в канале (К); z2(t) — количество заявок в приборе (П); zm(t) = ek, где еk — параметр k-й заявки в накопителе (Н); zе(t) — оставшееся время ожидания k-й заявки в накопителе (Н) до момента, когда она получит отказ,
со следующими компонентами: z1(t) — время, оставшееся до окончания обслуживания заявки, которая находится в канале (К); z2(t) — количество заявок в приборе (П); zm(t) = ek, где еk — параметр k-й заявки в накопителе (Н); zе(t) — оставшееся время ожидания k-й заявки в накопителе (Н) до момента, когда она получит отказ, ![]()
Входные сигналы (заявки) поступают в A-схему в моменты tj и принимают значения xj = ej. Рассмотрим случайные операторы V, U и G, описывающие такой агрегат. Пусть в момент tj поступает новая заявка. Тогда оператор V можно записать следующим образом:
Пусть ![]() т. е. обслуживание очередной заявки окончено. Этот момент является особым, так как в этот момент z(t) достигает Z(Y), т. е. z1(
т. е. обслуживание очередной заявки окончено. Этот момент является особым, так как в этот момент z(t) достигает Z(Y), т. е. z1(![]() ) = 0. Поэтому скачок состояний z1(
) = 0. Поэтому скачок состояний z1(![]() ) определяется оператором W΄ вида
) определяется оператором W΄ вида
Рассмотрим еще один особый момент времени ![]() , не являющийся моментом поступления входного сигнала. В момент
, не являющийся моментом поступления входного сигнала. В момент ![]() , когда истекает время ожидания одной из заявок, например i-й, число заявок в системе уменьшается на 1. Состояние А-схемы
, когда истекает время ожидания одной из заявок, например i-й, число заявок в системе уменьшается на 1. Состояние А-схемы ![]() определяется оператором W" вида
определяется оператором W" вида
В полуинтервалах (tn, tn+1] между особыми моментами времени tn и tn+1, к которым относятся моменты поступления в A-схему входных сигналов и выдачи выходных сигналов, состояния А-схемы изменяются по закону, задаваемому оператором U, который можно записать так:
Выходными сигналами А-схемы будем считать сведения о заявках, покидающих прибор (П). Пусть у(у1, у2), где у1 — признак (у1 = 1, если заявки обслужены; у1 =0, если
заявки не обслужены); у2 — совокупность сведений о заявке, например у2 = (ej, h, tδ), т. е. заявки поступили в систему обслуживания с параметром, ej, обслуживались при значении параметра системы h, покинули систему в момент tδ. Таким образом, действия оператора G сводятся к выбору признака у1 и формированию сведений о заявке у2. Для моментов ![]() и
и ![]() выходной сигнал у определяется параметром G и может быть записан в следующем виде:
выходной сигнал у определяется параметром G и может быть записан в следующем виде:
![]()
где ![]() находят из z1(
находят из z1(![]() ) = 0, а
) = 0, а ![]() — z1(
— z1(![]() ) = 0.
) = 0.
На основании состояний системы SQ можно оценить ее вероятностно-временные характеристики, например, вероятность нахождения в обслуживающем приборе (П) заданного числа заявок, среднее время ожидания заявок в накопителе (Н) и т. д.
Таким образом, дальнейшее использование обобщенной типовой математической схемы моделирования, т. е. A-схемы, в принципе не отличается от рассмотренных ранее D-, F-, Р-, N-, Q-схем. Для частного случая, а именно для кусочно-линейных агрегатов, результаты могут быть получены аналитическим методом. В более сложных случаях, когда применение аналитических методов неэффективно или невозможно, прибегают к имитационному методу, причем представление объекта моделирования в виде A-схемы может являться тем фундаментом, на котором базируется построение имитационной системы и ее внешнего и внутреннего математического обеспечения. Стандартная форма представления исследуемого объекта в виде А-схемы приводит к унификации не только алгоритмов имитации, но и к возможности применять стандартные методы обработки и анализа результатов моделирования системы S.
Рассмотренные примеры использования типовых математических схем (D-, F-, Р-, Q-, N-, A-схем) позволяют формализовать достаточно широкий класс больших систем, с которыми приходится иметь дело в практике исследования и проектирования систем.