Логическое моделирование цифровых устройств производится в системе PCAD с помощью программы PCLOGS, которая выполняет троичное асинхронное моделирование. Результаты моделирования представляются в виде временных диаграмм, по которым анализируется работа устройства, и выявляются, в частности, критические состояния и риски сбоев.
При троичном моделировании узлы цифрового устройства могут иметь один из трех логических уровней: логическая единица (high) «1», логический нуль (low) «0» и неопределенный уровень (unknown) «X». В начале моделирования все узлы, состояния которых принудительно не установлены, имеют неопределенный уровень «X».
В конфликтной ситуации, когда два или более сигналов от различных источников подаются на один вход, необходимо знать выходные сопротивления источников сигналов или их логическую силу. В программе PCLOGS выходное сопротивление (логическая сила) принимает четыре значения. Перечислим их в порядке возрастания:
1) S (supply) – малое выходное сопротивление источников питания и внешних генераторов;
2) D (driving) – выходное сопротивление управляемых КМОП-транзисторов;
3) R (resistive) – выходное сопротивление МОП-транзисторов с каналами n- и p-типов;
4) Z (high Z) – высокое выходное сопротивление.
В конфликтной ситуации логическое состояние узла определяется источником сигнала, имеющим меньшее выходное сопротивление. Каждый узел цепи в зависимости от его логического уровня и выходного сопротивления может находиться в одном из следующих 12 логических состояний (табл. 4.1).
Таблица 4.1
Логические состояния
|
Логический уровень |
Выходное сопротивление |
Логическое состояние |
|
High «1» |
Supply |
S1 |
|
Driving |
D1 |
|
|
Resistive |
R1 |
|
|
High Z |
Z1 |
|
|
Low «0» |
Supply |
S0 |
|
Driving |
D0 |
|
|
Resistive |
R0 |
|
|
High Z |
Z0 |
|
|
Unknown «X» |
Supply |
SX |
|
Driving |
DX |
|
|
Resistive |
RX |
|
|
High Z |
ZX |
В программе используются две безразмерные целочисленные единицы измерения временных интервалов: шаг (time step) и цикл (cycle), как показано на временной диаграмме (рис. 4.1).
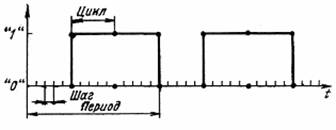
Рис. 4.1. Измерение временных интервалов при моделировании
Шаг — это минимальный интервал времени, используемый для измерения задержек сигналов. Цикл состоит из нескольких шагов; в синхронных устройствах это обычно период тактовой частоты. Длительность сигнала может задаваться как в циклах, так и в шагах; наиболее употребительно определение длительности сигналов в циклах. Цену одного шага в секундах назначает пользователь, например, можно длительность шага положить равной 1 нс (в программе эта информация не используется, на временных диаграммах отмечается только количество шагов и циклов).
Для моделирования цифрового устройства необходимо, чтобы в графических изображениях компонентов (примитивах, имеющих расширение *.SYM) содержалась информация о задержках сигнала. Она записывается с помощью атрибутов, имеющих вид (см. разд. 3.4): PCL= (r, f, «ls», «hs»). Здесь приняты следующие обозначения:
r – задержка сигнала на выходе компонента при изменении сигнала на его входе из состояния логического «0» или «X» в состояние логической «1», задается целым числом шагов;
f – задержка сигнала при изменении сигнала на входе из состояния логической «1» или «X» в состояние логического «0» (время спада сигнала), задается целым числом шагов;
«ls» – выходное сопротивление при изменении сигнала на выходе из состояния «0» или «X» в состояние «1»;
«hs» – выходное сопротивление при изменении сигнала на выходе из состояния «1» или «X» в состояние «0».
Программа PC-LOGS позволяет получить временные диаграммы сигналов во всех узлах схемы и проанализировать наличие пиков сигналов и нестабильности узлов. Пик сигнала возникает тогда, когда сигнал на входе компонента изменяется быстрее, чем выходной сигнал может отреагировать на это изменение. В то время, когда входной сигнал изменился, а выходной еще нет, выходной узел рассматривается как нестабильный. Программа сообщает о наличии пиков сигналов и нестабильностей узлов в определенные моменты времени.
Перед проведением логического моделирования должен быть создан чертеж принципиальной схемы с помощью программы PCCAPS. В качестве компонентов цифрового устройства используются стандартные типовые компоненты, макромодели, состоящие из этих компонентов (так называемые иерархические структуры), и компоненты, описываемые пользователем на функциональном уровне.