Разработка мероприятий по снижению производственных вибраций должна производиться одновременно с решением основной задачи современного машиностроения: комплексной механизации и автоматизации производства. Введение дистанционного управления цехами и участками позволит полностью решить проблему защиты от вибраций.
В неавтоматизированных производствах осуществляют следующие методы по уменьшению вибрации:
· в источнике возникновения,
· на путях распространения,
· путем соответствующей организации труда,
· применения средств индивидуальной защиты и лечебно-профилактических мероприятий.
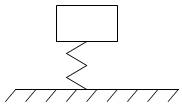
Рис. 8.3 Схема колебательной системы
Методы борьбы с вибрацией базируются на анализе уравнений, описывающих колебания машин и агрегатов в условиях производства. Эти уравнения сложны, так как любой вид технологического оборудования, так же как и его отдельные конструктивные элементы, является системой со многими степенями подвижности и обладает рядом резонансных частот.
Прежде всего, следует снижать вибрацию вблизи резонансов. В этом случае задача упрощается, так как машины и агрегаты можно рассматривать как колебательные системы с одной степенью свободы. При определении основных направлений борьбы с вибрацией следует ограничиться анализом уравнений вынужденных колебаний такой системы, которую можно представить в виде массы, покоящейся на пружине, другой конец ее жестко закреплен (рис. 8.3). Система, кроме
того, обладает трением. В этой системе с сосредоточенными параметрами элементы упругости, массы и трении отделены друг от друга. Для простоты анализа будем считать, что на систему воздействует переменная возмущающая сила, изменяющаяся по синусоидальному закону. Уравнение колебаний в этом случае имеет вид:
m ![]() +
+ ![]()
![]() + q x = Fm е jwt,
+ q x = Fm е jwt,
где m – масса системы, кг; ![]() – текущее значение виброскорости (равное dx/dt) м/с;
– текущее значение виброскорости (равное dx/dt) м/с; ![]() – коэффициент сопротивления, (Н с)/м;
– коэффициент сопротивления, (Н с)/м; ![]() – текущее значение виброускорения массы (d2 x / dt2), м2/с; q – коэффициент жесткости системы, Н/м; х – текущее значение вибросмещения; Fm – амплитуда вынуждающей силы, Н; w – угловая частота вынуждающей силы, рад/с.
– текущее значение виброускорения массы (d2 x / dt2), м2/с; q – коэффициент жесткости системы, Н/м; х – текущее значение вибросмещения; Fm – амплитуда вынуждающей силы, Н; w – угловая частота вынуждающей силы, рад/с.
Выражая вибросмещение в комплексном виде
x = Аm е jwt
и подставив соответствующие значения ![]() и
и ![]() в формулу, найдем выражение для соотношения между амплитудами виброскорости и вынуждающей силы:
в формулу, найдем выражение для соотношения между амплитудами виброскорости и вынуждающей силы:
Vm = .
.
Знаменатель полученного выражения
z =![]()
характеризует сопротивление, которое оказывает система вынуждающей переменной силе. Эта характеристика называется полным механическим импедансом колебательной системы.
Величина ![]() составляет активную, а величина
составляет активную, а величина ![]() – реактивную часть этого сопротивления. Реактивная часть, в свою очередь, состоит из двух сопротивлений: упругого
– реактивную часть этого сопротивления. Реактивная часть, в свою очередь, состоит из двух сопротивлений: упругого ![]() и инерционного
и инерционного ![]() . Механическое сопротивление измеряется в ньютонах, умноженных на секунду и деленных на метр (Н с/м).
. Механическое сопротивление измеряется в ньютонах, умноженных на секунду и деленных на метр (Н с/м).
Реактивное сопротивление равно нулю при резонансе, которому соответствует частота:
w = w0 = ![]() .
.
При этом система оказывает сопротивление вынуждающей силе только за счет наличия активных потерь в системе. Амплитуда колебаний на таком режиме резко увеличивается. Амплитуду виброскорости при резонансе определяют по формуле:
Vрез = ![]() ,
,
где ![]() – коэффициент потерь, характеризующий диссипативные силы в колебательной системе и определяющий значение амплитуды виброскорости при резонансе,
– коэффициент потерь, характеризующий диссипативные силы в колебательной системе и определяющий значение амплитуды виброскорости при резонансе, ![]() .
.
При частотах ниже резонансной
mw <q/w,
т.е. в случае, когда инерционное сопротивление значительно меньше упругого, полное сопротивление системы возмущающей силе при небольшом трении практически оказывается равным упругому z = q/w. Следовательно, на этих частотах система оказывает упругое сопротивление, как при действии статической силы. Амплитуда вибросмещения при этом равна упругой деформации при статическом действии силы:
xст = Fm /q,
а амплитуда виброскорости
Vm= wFm / q.
Если частота вынуждающей силы значительно выше резонансной, то mw>q/w. При малом трении ![]() < mw, система будет оказывать только инерционное сопротивление z = mw. При этом амплитуда виброскорости будет равна:
< mw, система будет оказывать только инерционное сопротивление z = mw. При этом амплитуда виброскорости будет равна:
Vm=![]() .
.
С увеличением частоты (w) сопротивление системы (z) возрастает и виброскорость снижается. Система как бы стремится к неподвижности. Систему с инерционным сопротивлением широко используют при защите от вибраций.
Таким образом, из проведенного анализа решения уравнения вынужденных колебаний системы с одной степенью свободы следует, что основными методами борьбы с вибрациями машин и оборудования являются:
1) снижение вибраций воздействием на источник возбуждения (посредством снижения или ликвидации вынуждающих сил);
2) отстройка от режима резонанса путем рационального выбора массы или жесткости колеблющейся системы;
3) вибродемпфирование – увеличение механического импеданса колеблющихся конструктивных элементов путем увеличения диссипативных сил при колебаниях с частотами, близкими к резонансным;
4) динамическое гашение колебаний – присоединение к защищаемому объекту системы, реакции которой уменьшают размах вибрации объекта в точках присоединения системы;
5) изменение конструктивных элементов машин и строительных конструкций.
Методы вибрационной защиты могут быть также разделены на методы, снижающие параметры вибраций воздействием на источник возбуждения, и методы, снижающие параметры вибраций на путях ее распространения от источника. К последним относятся методы 2, 3, 4 приведенной классификации, а также виброизоляция и применение средств индивидуальной защиты.