1. Объемы тел, образованных вращением криволинейной трапеции, ограниченной
кривой ![]() , осью
, осью ![]() и двумя вертикальными прямыми
и двумя вертикальными прямыми ![]() и
и ![]() , вокруг осей
, вокруг осей ![]() и
и ![]() , выражаются, соответственно, формулами
, выражаются, соответственно, формулами
 .
.
Замечание. В случае иного задания уравнения кривой (параметрического, в полярных координатах и т.д.) в приведенных формулах нужно сделать соответствующие замены переменных.
2. Объем тела, полученного при вращении сектора, ограниченного дугой ![]() и двумя полярными радиусами
и двумя полярными радиусами ![]() , вокруг полярной оси, может быть вычислен по формуле
, вокруг полярной оси, может быть вычислен по формуле
 .
.
Этой же формулой удобно пользоваться при отыскании объема тела, полученного вращением вокруг полярной оси фигуры, ограниченной некоторой замкнутой кривой, заданной в полярных координатах.
3. Если ![]() площадь сечения плоскостью, перпендикулярной к некоторой прямой (которую принимаем за ось
площадь сечения плоскостью, перпендикулярной к некоторой прямой (которую принимаем за ось ![]() ) в точке с абсциссой
) в точке с абсциссой ![]() , то объем этого тела определяется по формуле
, то объем этого тела определяется по формуле
 ,
,
где ![]() – абсциссы крайних сечений тела.
– абсциссы крайних сечений тела.
Пример 3.15. Вычислить объемы тел, образуемых вращением фигуры, ограниченной одной полуволной синусоиды ![]() и отрезком
и отрезком ![]() оси
оси ![]() вокруг: а) оси
вокруг: а) оси ![]() ; б) оси
; б) оси ![]() .
.
Решение:

 .
.
Пример 3.16. Вычислить объем тела, образованного вращением кривой ![]() вокруг полярной оси.
вокруг полярной оси.
Решение.
Пример 3.17. Определить объем клина, отсеченного от кругового цилиндра плоскостью, проходящей через диаметр основания и наклоненной к основанию под углом ![]() . Радиус цилиндра равен
. Радиус цилиндра равен ![]() .
.
Решение. Примем за ось ![]() диаметр основания, по которому секущая плоскость пересекает основание, а за ось
диаметр основания, по которому секущая плоскость пересекает основание, а за ось ![]() диаметр основания ему перпендикулярный. Уравнение окружности основания будет иметь вид
диаметр основания ему перпендикулярный. Уравнение окружности основания будет иметь вид ![]() (рис. 3.13). Площадь сечения АВС, отстоящего на расстоянии
(рис. 3.13). Площадь сечения АВС, отстоящего на расстоянии ![]() от начала координат равна
от начала координат равна
поэтому объем клина есть
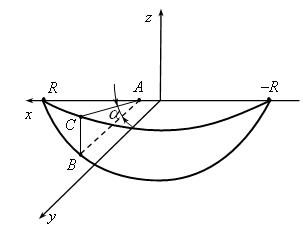
Рис. 3.13. Иллюстрация к примеру 3.17
Замечание. С помощью определенного интеграла можно решать многие физические задачи назовем некоторые из них: нахождение массы поверхности вращения, статического момента, момента инерции относительно оси или плоскости, координат центра масс; вычисление работы силы, пути, пройденного точкой при неравномерном движении по прямой с переменной скоростью и т. д.